Preferences
Tab Name

Tab Name- if Point Cloud Visualizer is too long for your tabs, you can change to shorter PCV.Custom Tab Name- if set to existing tan name, PCV panel is moved there.
GPU Memory To Max. Points Calculator

Calculate theoretical maximum of displayable points for given gpu memory, floored to nearest tens of millions. Result is valid only when Default shader is used and nothing else displayed, i.e. location and color per point only. See Large Datasets for more info.
Libraries
Check Environment- Helper operator that checks for legacy PCV libraries that must be uninstalledResolve Library Conflicts Using Python Subprocess- If library conflict is detected, execute operation in separate python subprocess, operation will take more time because input/output data will be written/read to/from disk in temporary directorybpy.app.tempdir
Defaults when using “PCV > Load” operator
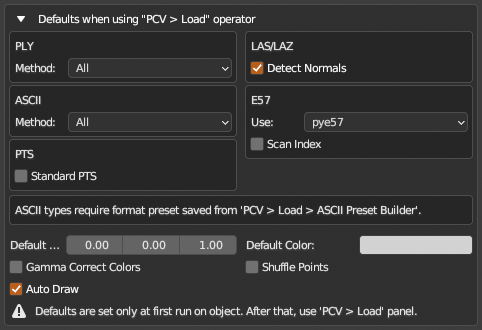
Default options for load operator: 3d Viewport sidebar > PCV tab and click Choose File ![]() .
.
Defaults when using “Add > Point Cloud Visualizer” helper operator
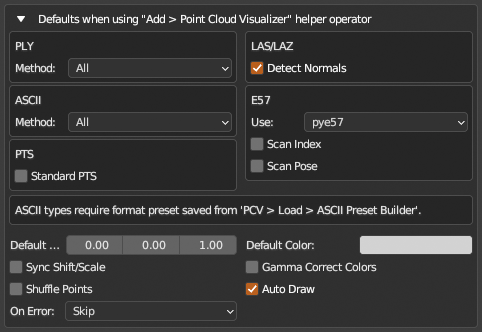
Default options for helper operator (adds empty object to scene and loads points for each selected file): 3D Viewport > Add > Point Cloud Visualizer Shift+A
Fast Navigation

Draw low resolution point cloud during viewport navigation. See Fast Navigation for more info.
Delay- Delay drawing of high resolution point cloud to viewport after navigation endedPercentage- Low resolution point cloud percentage, used until point count exceeds MaximumMaximum (Millions)- Low resolution point cloud maximum number of points, used when point count exceeds PercentageAuto Exclude (Millions)- Skip Fast Navigation if instance point count is lower, set to zero to disable and use on all instances, will not apply on points if low resolution is already generated in current session, reload files to update
Viewport

Fancy Selection Shader- Use nicer shader for selected points, uses more gpu memory - disable if that is an issueX-Ray Draw On Top- Draw points on top of everything else while 3D Viewport X-Ray is enabledSolid Alpha- Adjust alpha of X-Ray points at Solid shadingWireframe Alpha- Adjust alpha of X-Ray points at Wireframe shading
Tools

Show Help Panel At Tool Start- Disable to hide help panel for each tool.Show Tools Color Theme- Edit color theme of Tools to fit your Blender theme.
Packer

Store loaded points as hidden mesh datablock with attributes in blend file. Automatically restore and draw points from datablock at blend file load, save points to datablock on blend file save.
This operation is meant to be fully automatic (if Auto Pack and Auto Optimize options in preferences are enabled, they are by default) once loaded point data are marked for packing clicking Pack icon next to file path on main PCV panel (this will work for any file formats, even those loaded using Import panel).
If Packer is enabled, main operators (Draw, Erase, Reload etc.) will prioritize packed data (if available) over loading from ply file.
Packer adds utility operators to 3D Viewport Panel as well as list of packed datablocks in blend file. See Packer for more info.
Auto Pack: pack all points that are loaded and/or displayed when blend file is being savedAuto Optimize: remove packed datablocks on blend file save if container object is not found in scene
Utilities

Reset PCV On Active Object- Reset all PCV properties stored on active objectReset PCV Preferences- Reset all PCV Preferences