Points
Filter > Points panel contains filters operating on points or points positions.
Filters are directly applied on loaded points, Blender undo system does not work. To have single history state to return to, see Store/Restore state operators
Simplify
Contains several methods to reduce number of points.
Distant Samples- Start from random point, select number of candidates, accept the most distant from already accepted, repeat. This is very slow process on large datasets. See Poisson Disk Elimination for much faster algorithm with similar result.Voxel Grid- Split points to grid, remove extra points, average normals, colors and scalars per grid cell. Slower than Voxel Downsample, but has more options.Slice- Slice by percentage. Optionally shuffle points before slicing. Similar effect asDisplay > Points > Percentage, but modifies points directly.Reduce- Reduce point cloud to exact number points. Same asSlice, but allows you to set target number of points.
Remove Duplicates
Remove points by minimal distance between them. Operates on transformed point locations in world coordinates.
Poisson Disk Elimination
Downsample points by removing points that are within set radius from other points.
Voxel Downsample
Voxel downsampling uses a regular voxel grid to create a uniformly downsampled point cloud from an input point cloud.
It is faster than Simplify > Voxel Grid, but have less options. Choose from Open3D or PCV implementation.
Crop
Remove points outside or inside of bounding box of a mesh object.
Boolean
Boolean intersect or exclude points with a mesh object.
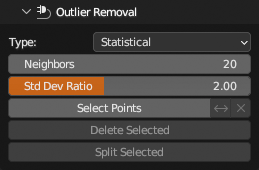
Outlier Removal
Remove points that are further away from their neighbors compared to the average for the point cloud. Useful for removal misaligned single points.
Choose from Open3D or SciPy implementation.
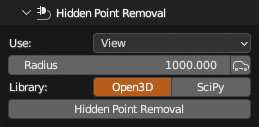
Hidden Point Removal
Estimates visible points from view or object location and removes hidden.
Choose from Open3D or SciPy implementation.
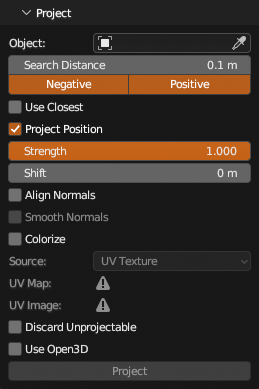
Project
Projects points along their normals (backwards, forwards or both) on mesh surface. Points can be moved to hit location, their normal can be replaced with surface normal (optionally interpolated) and points can be colorized by mesh uv texture, color attribute or vertex group, all of these properties can be enabled individually. Can also discard points that can’t be projected. Use Open3D option can be used to speed up ray casting.
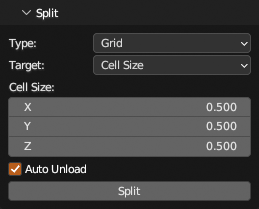
Split
Split points to multiple PCV instances. Points can be split to Grid, or by point Count per instance or to several Pieces with roughly same point count.
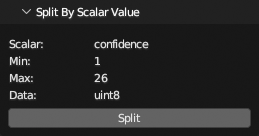
Split By Scalar Value
Split points by integer scalar field. Useful to split classified points separate PCV instance per class.
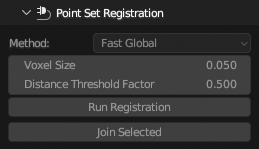
Point Set Registration
Align multiple PCV instances, selected are always aligned to active. There are several Method types to choose from.
For details on each method see Open3D documentation. Generally Fast Global is good enough, if more precision is required, use Global with Local Refinement.
Join
Join selected PCV instances to one.
Apply Shader Effects
Apply shader Display > Effects to points.
Transfer Data
Transfer normals, colors and scalars from active to single selected other PCV instance by proximity, there is no interpolation, values is taken from closest point in active instance.
Add Noise
Apply Random or Turbulence noise to point positions.
Histogram 3D
Calculate 3d histogram of points, split points to 3d cells of equal sizes and calculate number of points they contain or cell density, put result to a new PCV instance, counts or densities as a scalar field.
DBSCAN Clustering
Group local point cloud clusters together and add group indices as a scalar field.